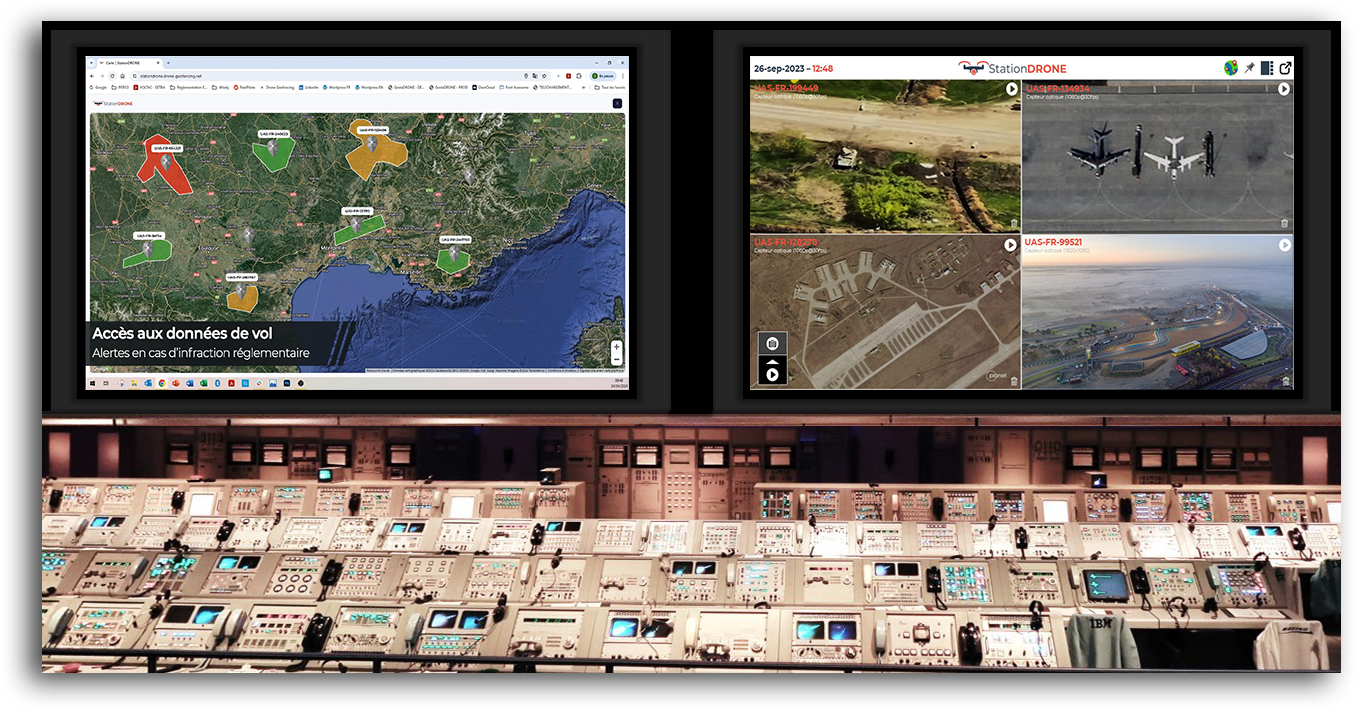
Le superviseur, localisé dans le centre de contrôle, peut suivre en temps réel depuis la station sol l’évolution de sa flotte (ou de l’essaim) de drones.
Des vols automatiques ont été programmés en amont sur l’ensemble des drones.
Le superviseur est alerté en cas de problème et peut intervenir sur la conduite du vol en activant une séquence d’urgence préprogrammée ou en commutant en pilotage manuel.